Beispiel 10....Bewegungsgsdesign für ein Getriebe zur Förderung von Stückgütern....3.10
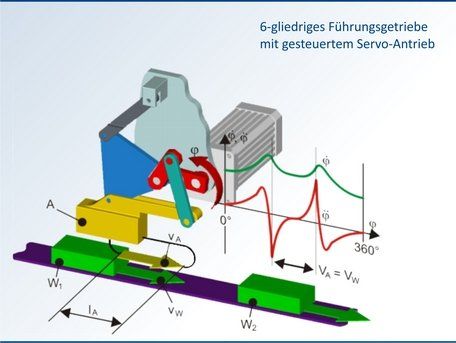
Das Beispiel behandelt ein sechsgliedriges Koppelgetriebe, das bei umlaufendem Antrieb an der roten Kurbel das gelbe Arbeitsorgan parallel zu sich selbst bleibend auf einer ovalartigen Bahn führt, die im hier genutzten unteren, von links nach rechts durchlaufenen Abschnitt eine angenäherte Geradführung aufweist. Ein solches Getriebe kann für verschiedene, bei Verpackungs- und Verarbeitungsmaschinen typische Aufgaben genutzt werden. Im linken Bild bewegt sich das gelbe Arbeitsorgan jeweils eine Zeit lang synchron mit irgendwelchen Produkten, die auf einem Förderband durchlaufen, um an diesen Produkten während der Gleichlaufphase irgendeine Arbeit zu verrichten, die keine Relativbewegung erlaubt, z. B. einen Aufdruck zu applizieren. Im rechten Animationsfilm trägt das Arbeitsorgan einen Mitnehmerfinger und dessen Funktion besteht darin, die mit geringem Abstand auf einem langsamen Förderband von links angelieferten Produkte sanft auf die erheblich höhere Geschwindigkeit des rechten Förderbandes zu beschleunigen, das die Produkte dann mit entsprechend größerem Abstand weitertransportiert. In beiden Anwendungsfällen dient ein elektronisch gesteuerter Servo-Motor (Motion Control System) an der roten Kurbel als Antrieb, für den jeweils entsprechende Bewegungsvorgaben ermittelt werden müssen. Dabei sind in der Regel mindestens zwei Bewegungsabschnitte voneinander zu unterscheiden. Zum einen kann durch eine verlangte technologische Funktion am Arbeitsorgan der dortige Bewegungsverlauf bereits fest vorgeschrieben sein - hier z. B. exakter Gleichlauf mit den geförderten Produkten - und dann ist nur noch eine "Rückrechnung" (inverse kinematische Analyse) auf den dazu erforderlichen Antriebsverlauf durchzuführen. Es können für einen bestimmten Bewegungsabschnitt aber auch nur gewisse Randbedingungen vorgegeben sein - z. B. für den Rücklauf des Arbeitsorgans vom Verlassen des bisher bearbeiteten Produktes bis zum Aufsynchronisieren auf das folgende Produkt. Dann kann und sollte ein solcher Bewegungsabschnitt optimierend gestaltet werden, bei hohen Taktzahlen z. B. im Hinblick auf Erzielung eines möglichst geringen Antriebsmomentes infolge der dynamischen Auswirkung des veränderlichen reduzierten Massenträgheitsmomentes eines solchen ungleichmäßig übersetzuenden Getriebes.